The HIVE Multi-agent Simulator is a set of simulation tools developed by Tristan Barnett for running tests in embodied multi-agent environments.

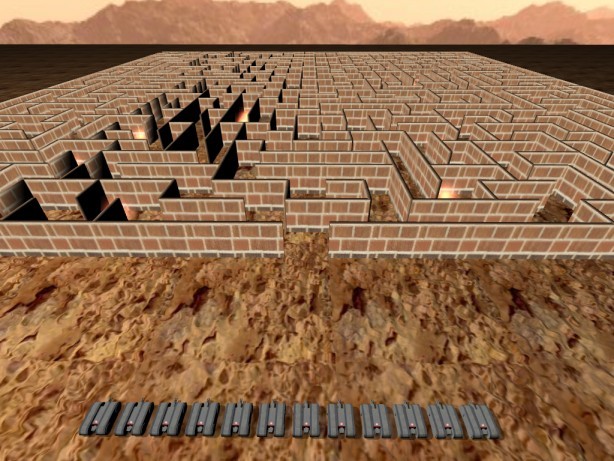
Robot search problem in HIVE Multi-agent Simulator 3D.
A simulator for distributed intelligence
The set of custom-build simulation tools were developed in order to run agent-based system tests in distributed computing environments. It has been used to experimentally test the CAEDA Cognitive Architecture in tank-tracked robot search and rescue scenarios.
The HIVE simulation environment includes:
- A 3D graphical environment for complex environment tests, featuring a 3D physics, weather simulation and random maze generation.
- A 2D graphical environment for simplified environment tests.
- An intelligent agent API which can be implemented to test different agent designs.
- Scenario and map design tools for different problem domains such as predator-prey and search-and-rescue.
Project summary
As used with the CAEDA Cognitive Architecture
| Developer Tristan Barnett |
Date 2008-2012 |
| Achievements
Podium presentation at TMCE 2010, an international, peer-reviewed conference held in Ancona, Italy.
Publication in the peer-reviewed Journal of Mechanical Engineering.
|
|
Technologies Used
|
|
-
- HIVE Multi-agent Simulator 3D
-

- HIVE Multi-agent Simulator 2D
-
- HIVE Tank-tracked Robots
Recent Comments